Alternatives Evaluation
Introduction
The
HCS12 μProcessor from Freescale,
the PIC24 μProcessor from Microchip, and the Amtel Atmega 2560 μProcessor were evaluated for suitability for
gathering, recording and then playing back sensor data. All three μProcessors had mostly similar capabilities, but a few
important differences. The number of A/D interfaces on the Freescale
based μProcessor disqualified the HCS12 μProcessor. Then by weighing the design criteria, the
differences between the PIC24 and the Atmega 6250 were
used in selecting the PIC24F μProcessor from
Microchip.com
Design Alternatives
HCS12
μProcessor from Freescale.com.
The
Freescale family of microprocessors
are well known and used in various classes at MSU. The HCS12 is a 16-bit
processor used in EELE 371 and is well suited for this project. The only
problem is that it does not have enough A/D input channels as required by this
project, so it will not work.
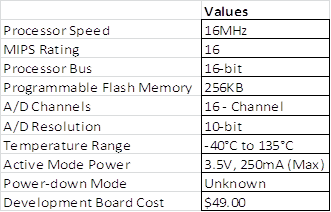
PIC24F
μProcessor from Microchip.com.
The
Microchip family of microprocessors have several 8-bit
and 16-bit versions, but the one selected for prototyping is the PIC24 16-bit
processor with256KB programmable flash memory. The pertinent specifications
follow:
Table 1: PIC24
Microprocessor Specifications
|
|
|
Figure 5.1 � Picture of packaging used for the PIC24F |

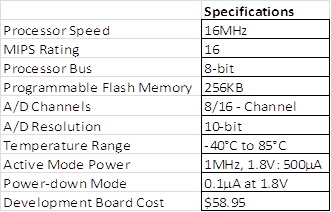
Mega2560
μProcessor from Arduino.cc.
The
Arduino family of μProcessors
uses various Atmel processors. The most advanced being the Atmega
2560 processor. The pertinent specifications follow:
Table 2: Mega2560
Microprocessor Specifications
Client/User Operation
Design Matrix
Weighing
the main differences between the competing processors on a scale of 0-10 and
then scoring each processor on a scale of 0-10, multiplying the weight by the
scale and then summing all the products gives a weighted score for each
processor. A perfect score for a processor is 440 points. Neither got perfect
scores, but the Microchip PIC24F processor got a much better score of 377
versus 325, which leads to deciding that the Microchip PIC24F processor should
work better for this application.
Table 3: Descision
Matrix
