Underwater Navigation System for AUVSI Sub
Rigid Body Orientation
Visualization (2nd Method: Quaternions)
The team decided to use quaternions and vector math to determine the
rigid body orientation of the Sensortag IMU. Quaternions are a nice
mathematical concept to use for orientation and attitude visualization
for navigation designs. Quaternions are an extension of imaginary
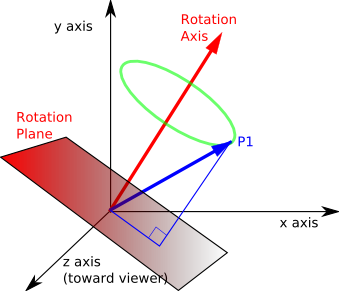
numbers. They invlove a scalar compnent which is defined as a rotation
about a axis of rotation. A graphical representation of quaterninons is
shown below.