Critical Subsystem Demonstration
The purpose of this exercise was to demonstrate that the fulcrom of the design would function.
The critical subsystem of this design was characterizing the pixel response of the Raspberry Pi camera, verifying the ability to calculate NDVI. The bayer pattern of the camera gives red, blue, and green responses.
Bayer Pattern
The following plot illustrates the obtained characterized responses for each portion of the camera's bayer pattern.
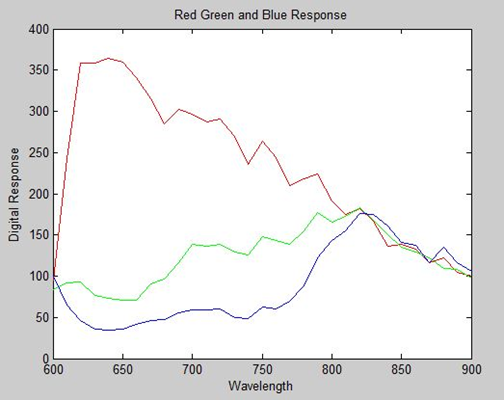
Camera Characterization