
Key Accomplishments
Unweighting
The unweighting subsystem up the project consists of a piston that has an compressed air input. This input is controlled by a control unit that is able to adjust compress air output via a voltage signal. What this system does is, extends the piston with air pressure to adjust the length of the rope. When the piston extends it retracts the rope and when it compresses the rope extents and thus when a certain pressure is put inside the piston it applies a force on the rope and whatever is connected to the rope.
Trolley Design
A trolley will be rolling back and forth on the I-beam when the person, connected to the harness, moves back and forth. The problem with this is that the trolley has a certain mass and when the mass is moved it has a force, then this force will be applied to the patient in every movement. The patient would have to drag the trolley when moving and when stopping, the patient will feel the force of the trolley having to stop as well. To remove this mass force of the trolley, the trolley will have to be controlled with movement. The goal is to have the trolley be directly above the person at all times.
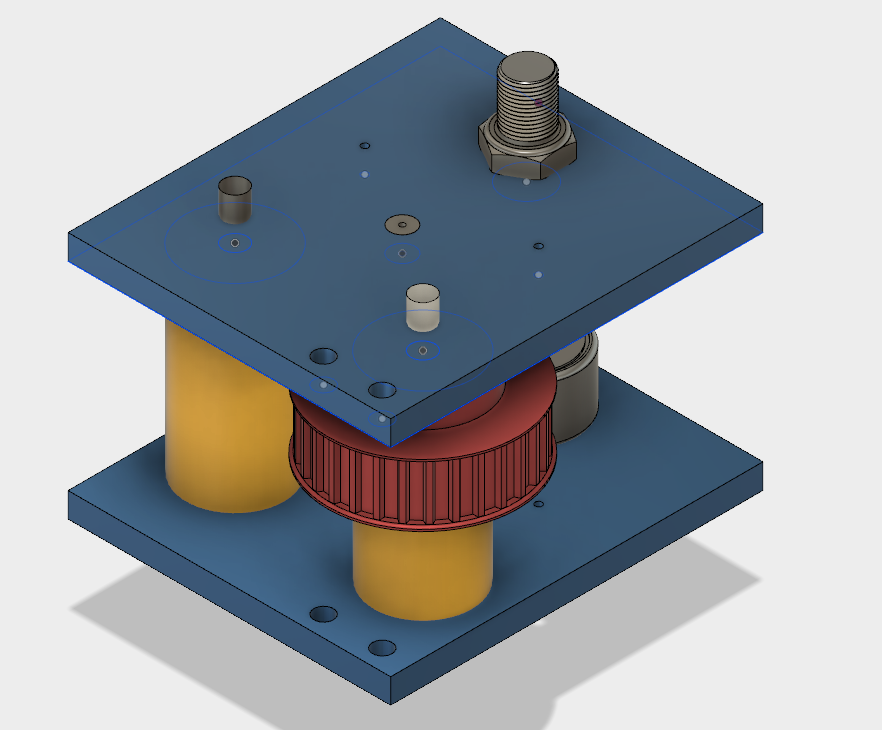
Figure 1: Trolley Design
Human Interface & Control
The control system will consist of an arduino that will be able to interface to an air control valve that will drive the unweighting system and a motor controller that will drive the trolley system.
The human interface system will simply be able to take a user’s input and configure the entire system to those needs. As the arduino is used to control the unweighting air valve control and the motor on the trolley, it will also interface into a 16 by 4 LCD screen and a 10 digit keypad. In order to configure the system, the control needs to know the unweighting or lifting force to apply and when to begin the motor or position control.
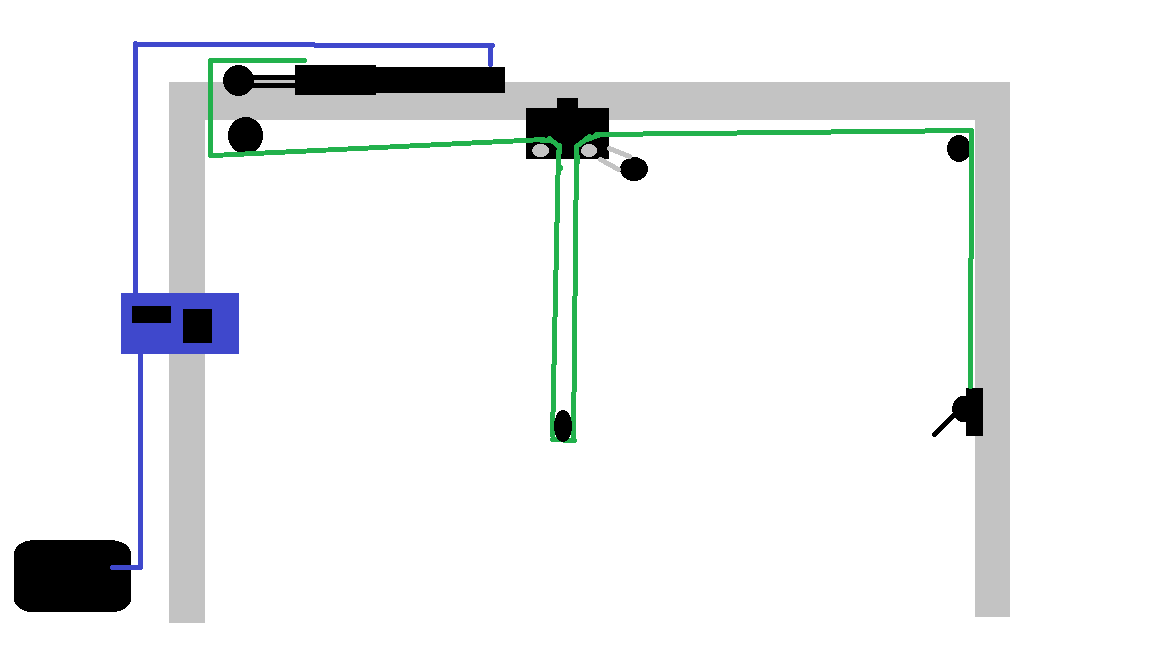 Figure 2: Simple Design Diagram
Figure 2: Simple Design Diagram