
Key Accomplishments
Sensors
QTI Sensors
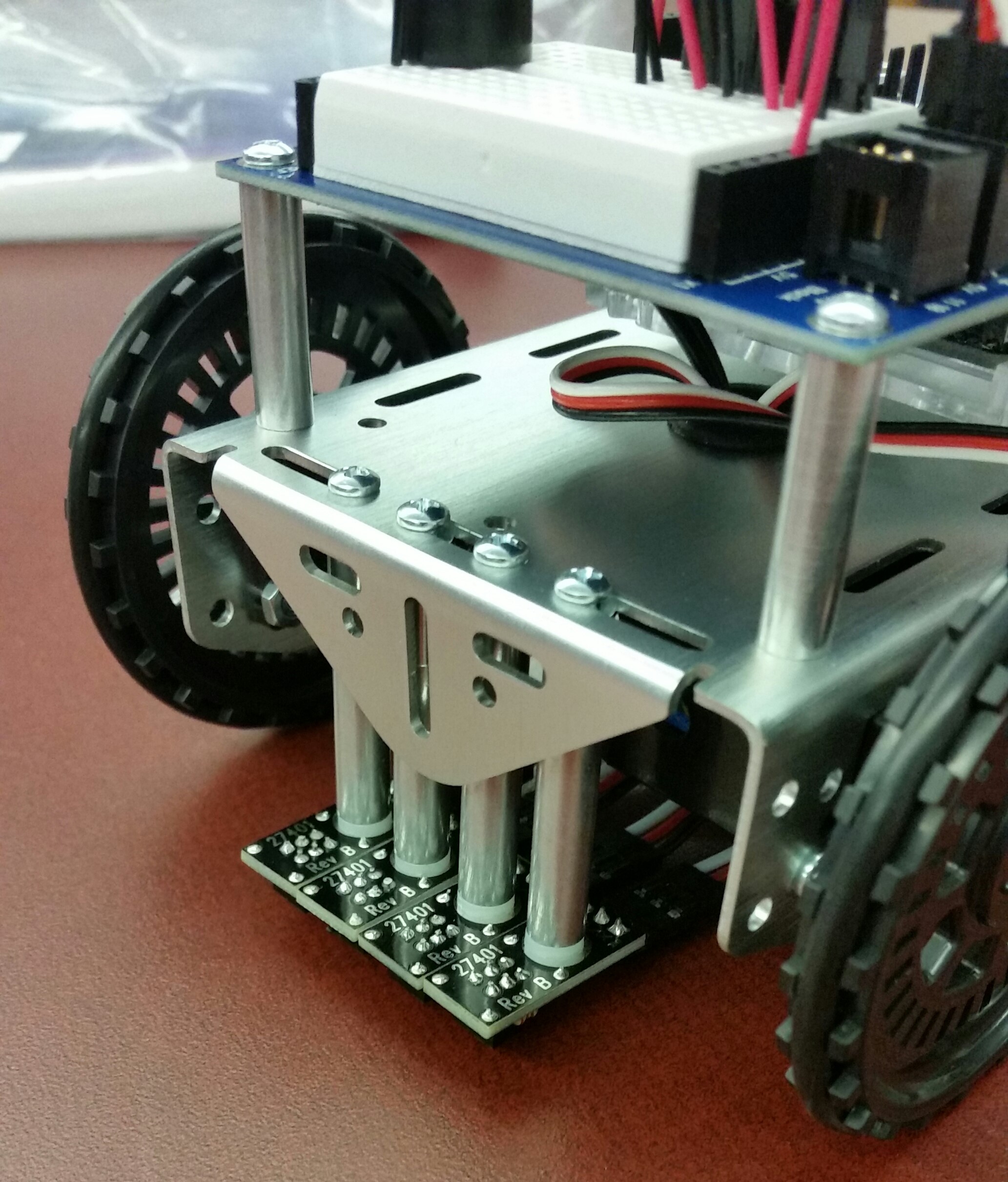
Four QTI sensors have been mounted to the front of the chassis. The line tracking and wheel rotating code has successfully navigated the robot over a short, curving line. Potential changes will be made regarding new servos with the robot travelling at a faster speed.
Power
We have identified all power requirements of the current car as well as identified any additional requirements that new servos would create. With this in mind, we have decided to use a high output current version of standard Li-Ion cells to be able to both provide the new current demands as well as be rechargeable and thus more convenient.
Servos
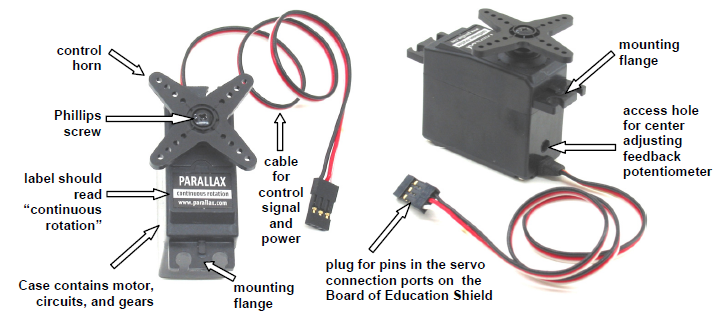
Stock Servo
We have identified the top speed of the current, unmodified car and determined that this speed, while easy to control, needs significant improvements to be competitive. More calculations need to be made for the top speed necessary or even possible, but afterwards a more comprehensive list of servo motors can be compiled and compared.