Underwater Navigation
System
AUVSI Sub
Support Team
Chris
Scherr (EE)
Gavin
Lommatsch (EE)
Sam Hooson (EE)
Dr. Todd Kaiser (advisor)
SENSOR CALIBATIONS
(magnetometer)
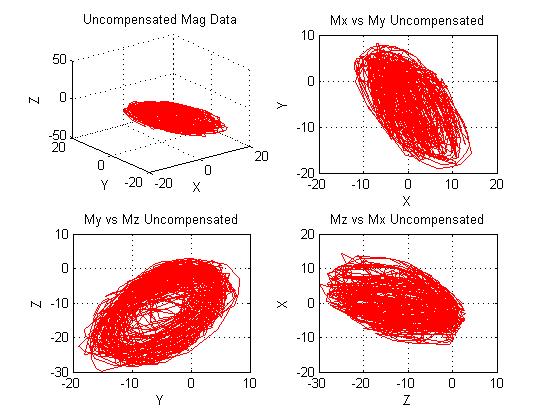
The MAG3110 magnetometer on the Sensortag must be calibrated for hard
and soft iron biases. Hard iron biases are permenent magnetic offsets
present at the current location, and soft iron biases are non-permenent
biases created from nearby electronic and magnetic fields. These
soft-iron biases skew the magnetometer data to become elliptical and
tilted from the major and minor axes. Plots were generated by rotating
the Sensortag in as many positions as possible to gather many data
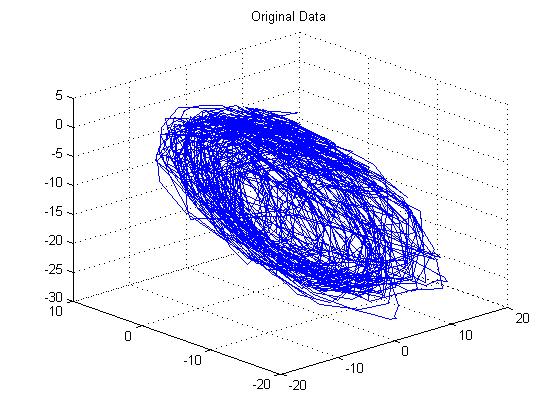
points and traced out a 'full' ellipsoid. The data of uncompensated
magnetometer data is shown below. Notice the offset from the origin.
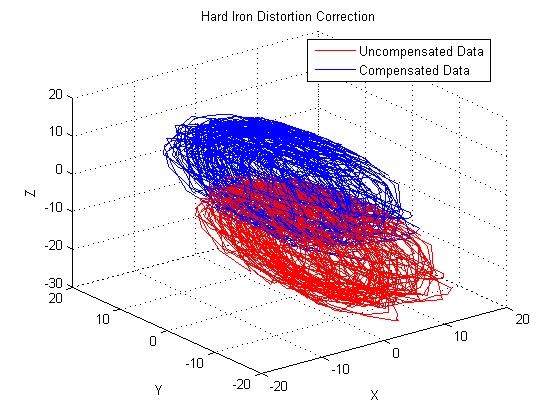
The first compensation that is to be accomplished is the hard iron
compensation. The results are shown below (notice the shift to the
origin).
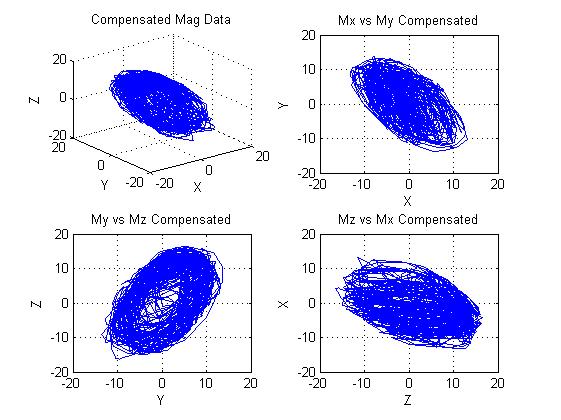
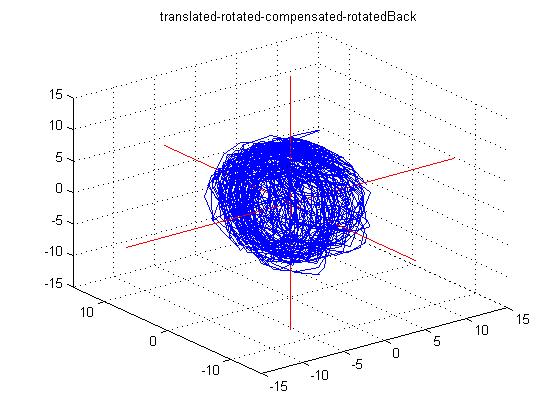
After the hard iron bias is compensated for, the soft iron bias must be
compensated for. This compensation will take the traced ellipsoid and
fit it into a sphere. The soft iron bias compensation results are shown
below.
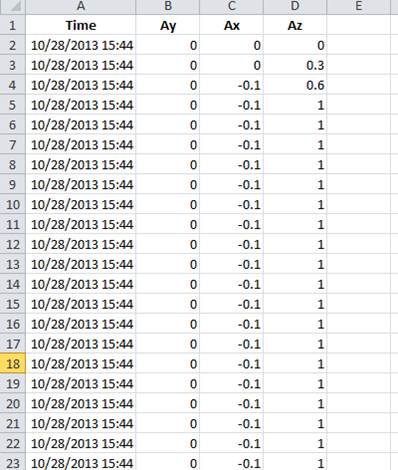
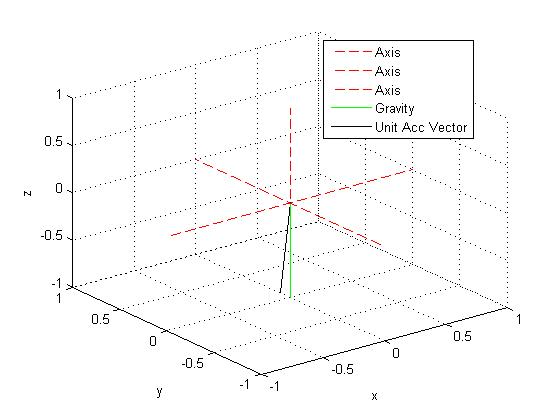
(accelerometer)
Static data was collected from the accelerometer to determine the
accelerometer offset from 1g down. The results are shown below. Notice
the -0.1 g bias in the x direction. This offset from the tilt on the
PCB will need to be compensated for, but is not a huge issue at this
point in the navigation design.