Underwater Navigation
System
AUVSI Sub
Support Team
Chris
Scherr (EE)
Gavin
Lommatsch (EE)
Sam Hooson (EE)
Dr. Todd Kaiser (advisor)
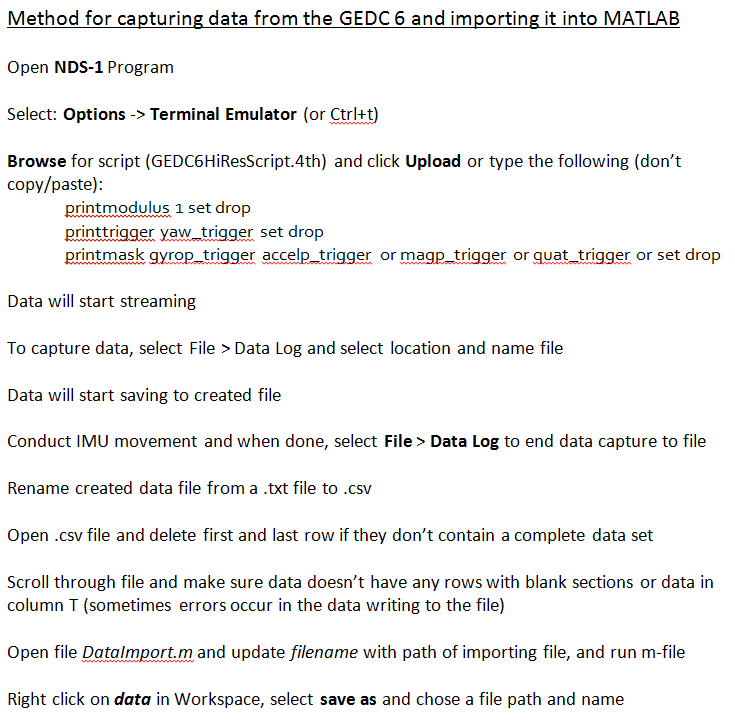
Data Acquisition
Initially
the SensorTag was used for data aquisition but after determining that
the resolution of thesensor was below a usable threshold, development
was moved to the Sparton GEDC-6 IMU.
The
process used for
collecting the data and importing it into MATLAB is outlined below.
(The end goal is to bypass the NDS-1 program and read directly into
MATLAB but progress still needs to be made in order for that method to
work smoothly)
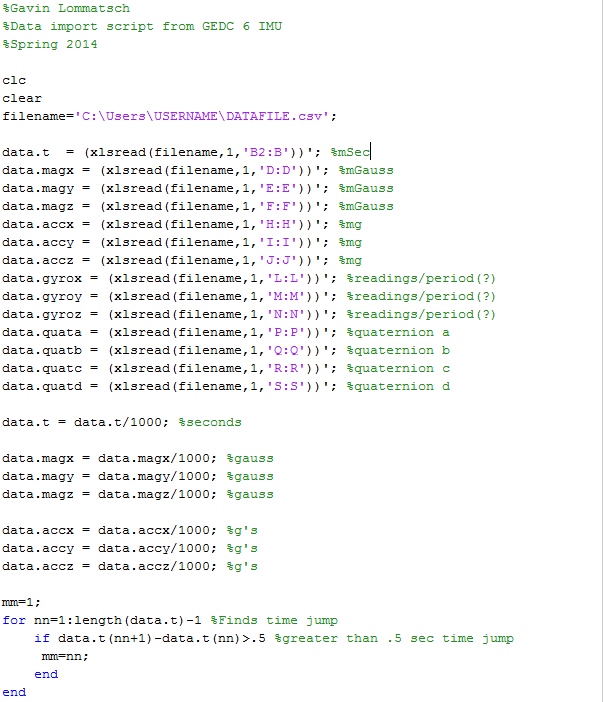
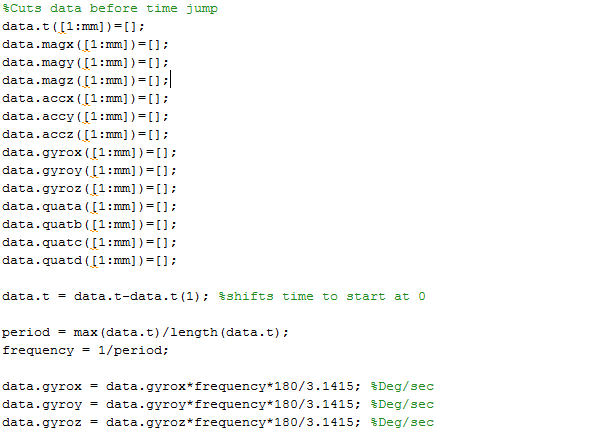
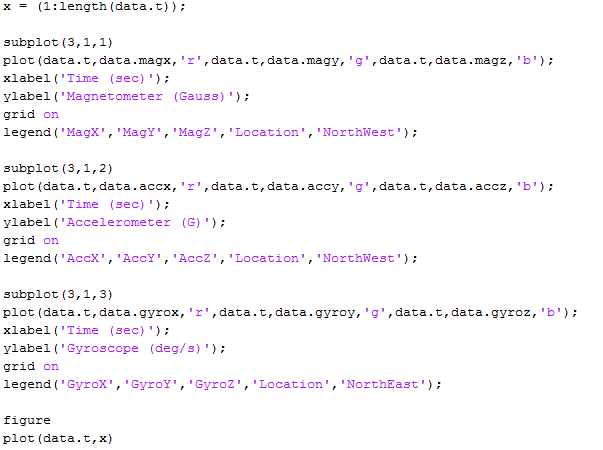
MATLAB import code
(DataImport.m)