Underwater Navigation
System
AUVSI Sub
Support Team
Chris
Scherr (EE)
Gavin
Lommatsch (EE)
Sam Hooson (EE)
Dr. Todd Kaiser (advisor)
Mission Statement
“In order for the underwater robot team and other autonomous vehicle
projects to move to the next level, a system to monitor attitude and
position is required. Past teams have incorporated a complete Inertial
Measurement Unit (IMU) for navigational purposes into the design, but
have not fully utilized its capabilities to monitor or control
positions. Our design team will take the outputs from 3-axis
accelerometers, gyroscopes, magnetometers, and pressure sensors, and
optimally fuse them together to produce an output of three dimensional
position and orientation that can be visualized on a computer screen
and used to control a submarine, land vehicle, or airborne platform.”
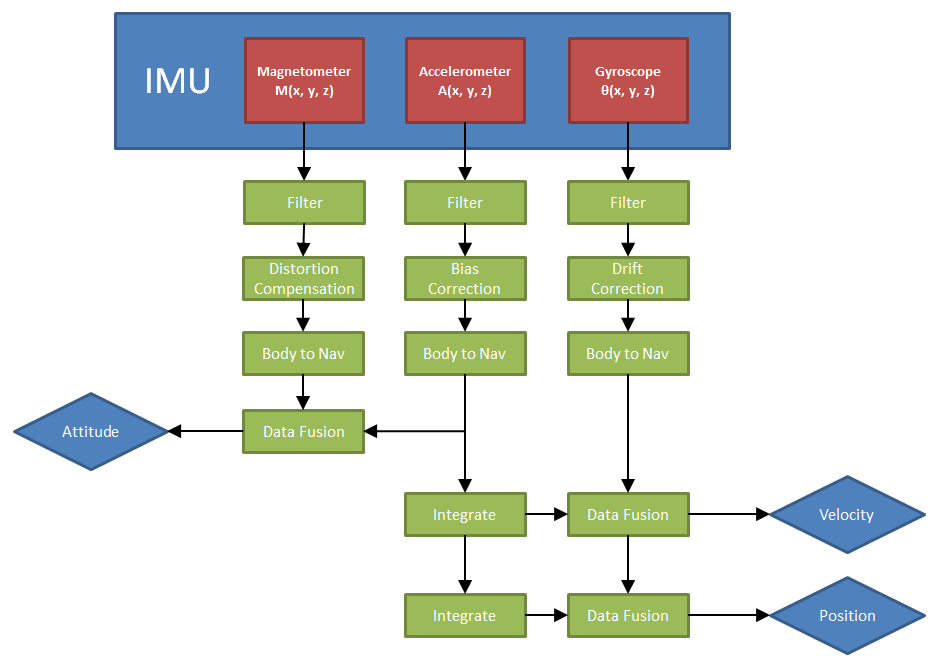
Overall Navigation Design
Archeticture