Underwater Navigation
System
AUVSI Sub
Support Team
Chris
Scherr (EE)
Gavin
Lommatsch (EE)
Sam Hooson (EE)
Dr. Todd Kaiser (advisor)
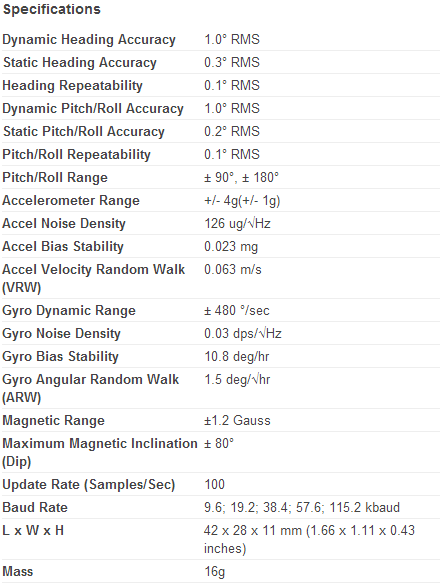
Sparton GEDC-6 IMU

The second Inertial
Measurement Unit used was the Sparton GEDC-6 which offered a much
higher data sampling rate as well as much higher accuracy from all
onboard sensors.
Features:
Specifications: